過去のクラス活動報告
【ロボットアームをつくる!】指の動きに合わせて動く人口の手 科学工作

【2019/10/14モネスク教室風景(土曜サイエンスアートクラス)】
本日10/14(月)は12日(土)近畿に接近しておりました台風の為、
サイエンスアートクラス振替のレッスンを行いました。
今回のサイエンスアートクラス、テーマは「アームロボット」をつくるです!


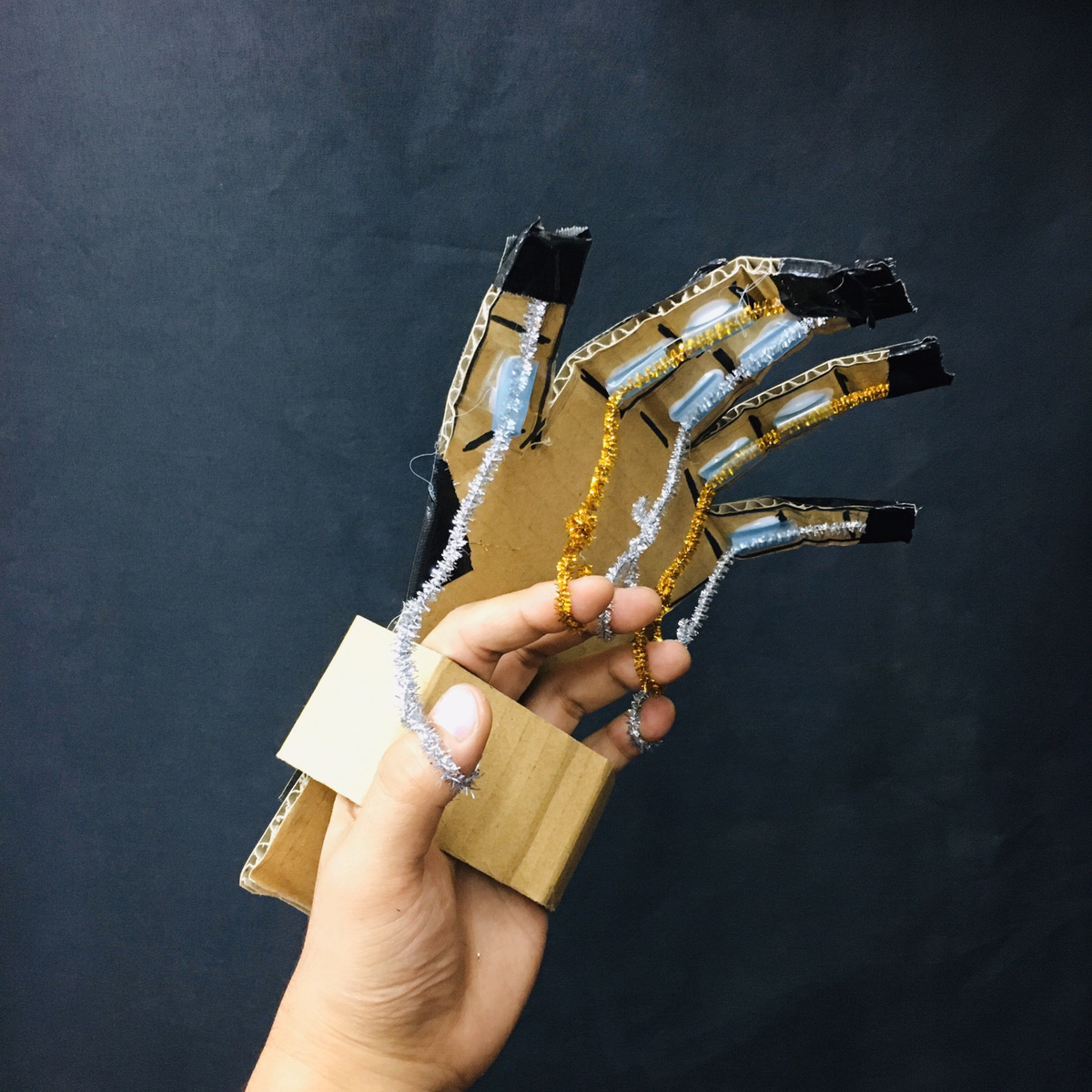
自分の指の動きに連動して動く不思議なロボットアームです!
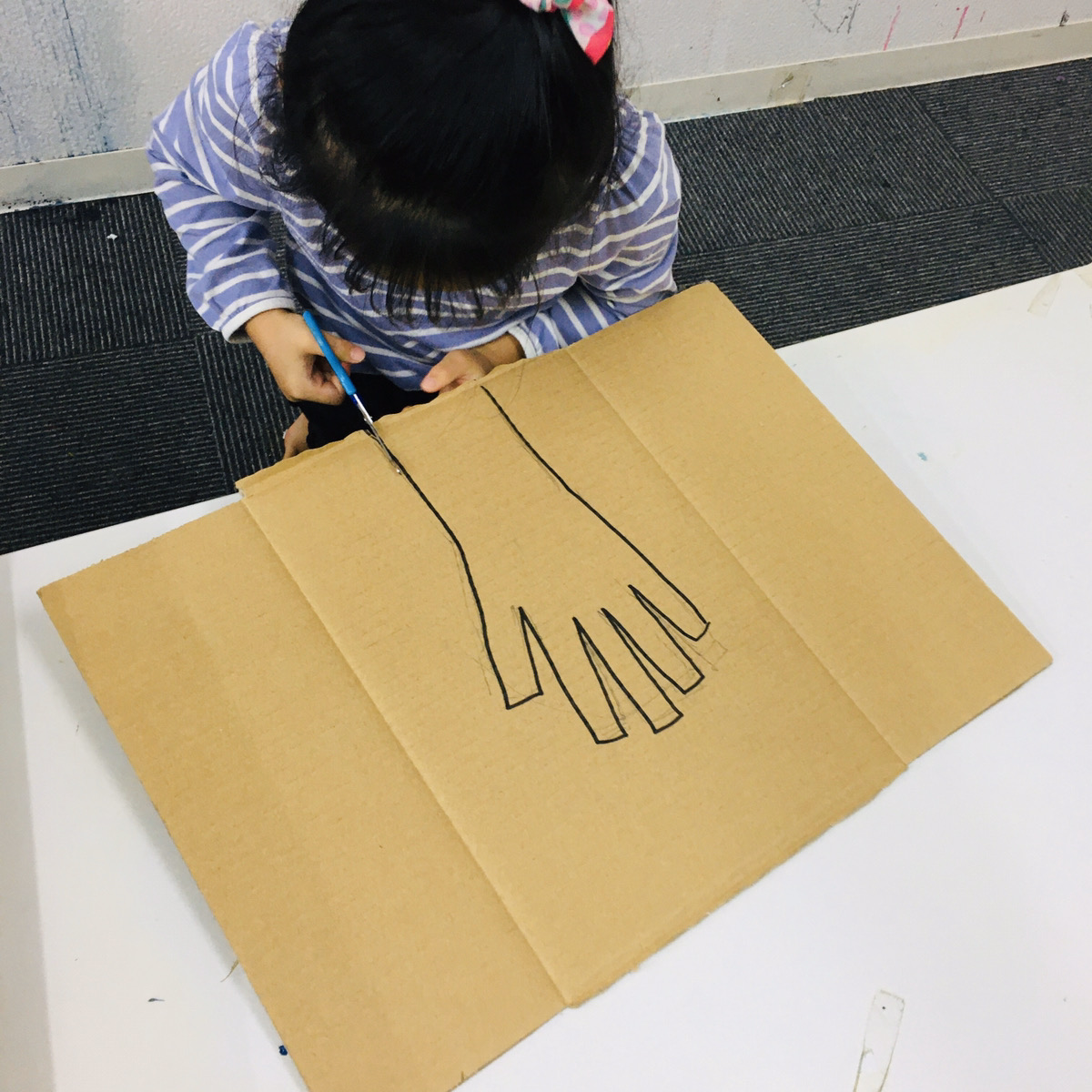
まずは生徒さんのそれぞれ異なる手のサイズに合わせる為、ダンボールに
手の形を(大き目)にトレースし、カットします。
この時ダンボールの目は横向きで指の関節を折り曲げやすいようにするといいです。

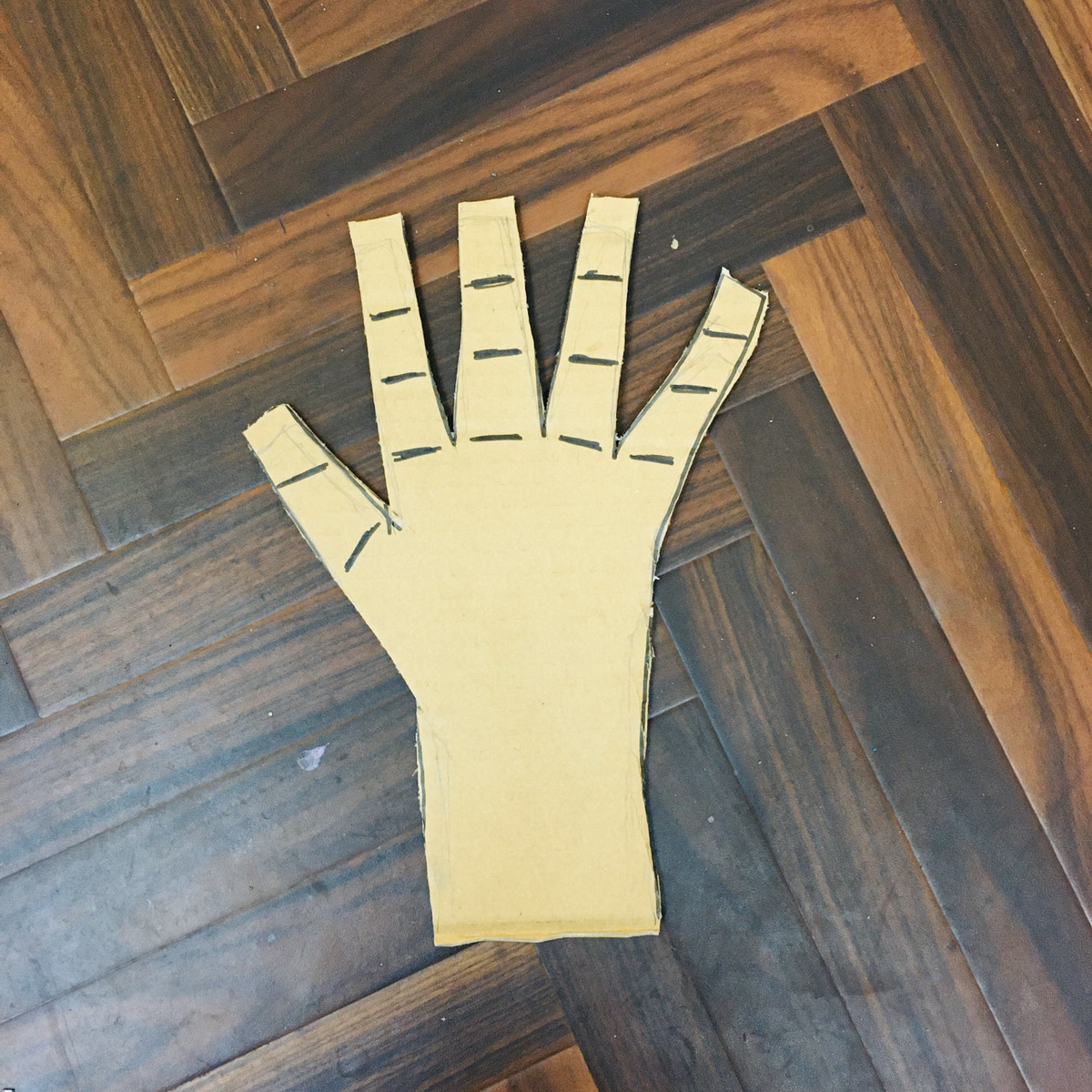


カットしたところで、自分たちの手を観察してもらいます。
指の曲がるしわになっている関節部分をそのままロボットアームに書き写します。
線は内側に定規などを使用し曲げます、そうすることでまるで人間のような
関節が動く自然な動きを再現します!


つづいて、関節の間にカットしたストローを固定します。
今回は短時間でしっかり固定できるグルーガンを使用しました。
先生が手伝いをしながら、張り付けていきます。


続いては、指の筋肉(筋)となるモールを穴に通します。
指の先端だけしっかりとテープで留めます。
長さはあとに調整することにしました。



実際に手を通すグラブ部分は、ダンボール片を固定します
(生徒さんの手の大きさによって握りやすい幅を調整しました)
先程のモールに指をかける部分を作ります。
指を伸ばした先端に引っ掛けられるよう、長さを調整しモールを曲げてわっかを作りました。
最後にそれぞれデコレーションしオリジナルのロボットアームに仕上げました!




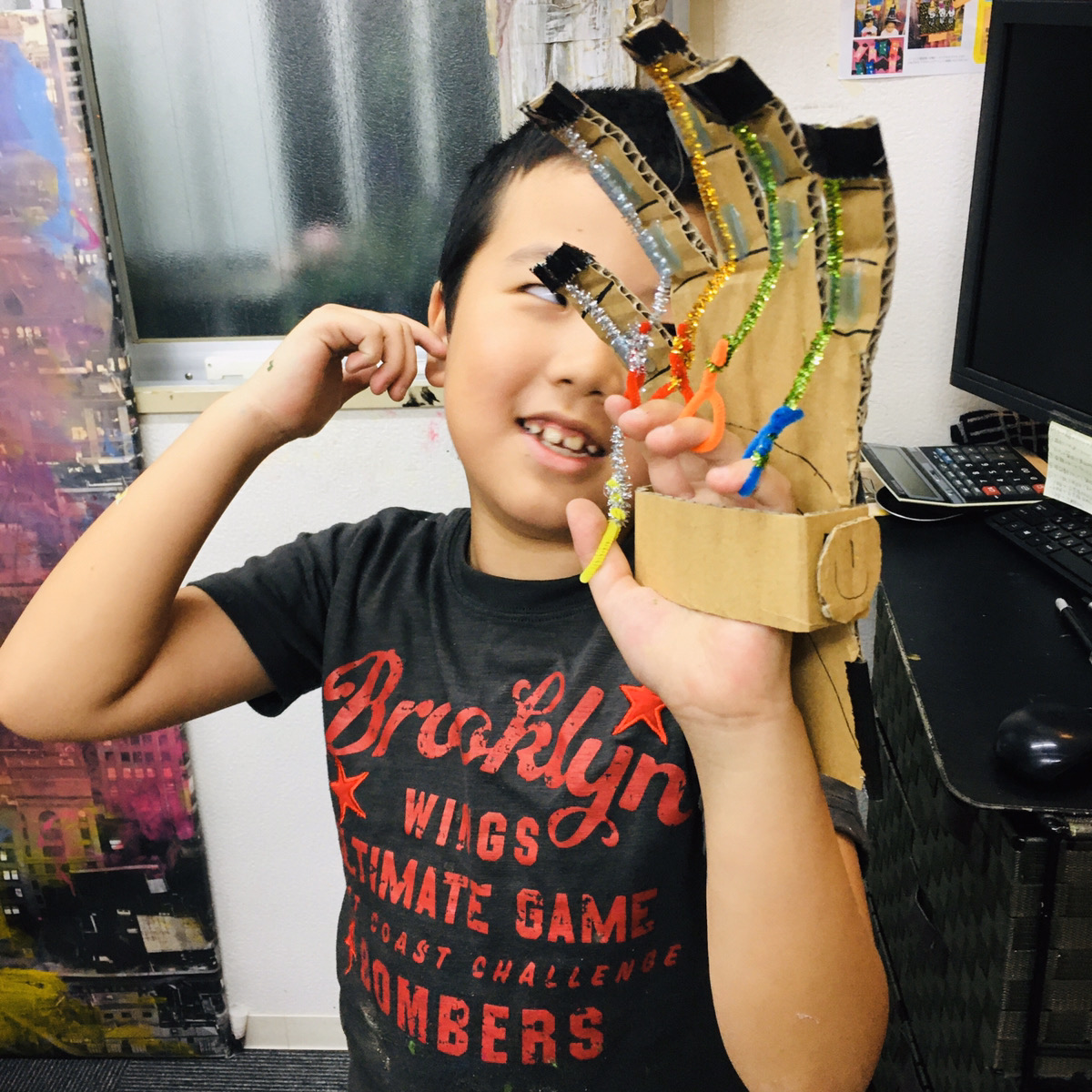
最後にはロボットアームでじゃんけんをして遊びましたね(笑)
介護や身体的補助の役割としても活躍し、ますます発展するロボット
将来より身近になるロボット技術を知っていただくレッスンとなりました!